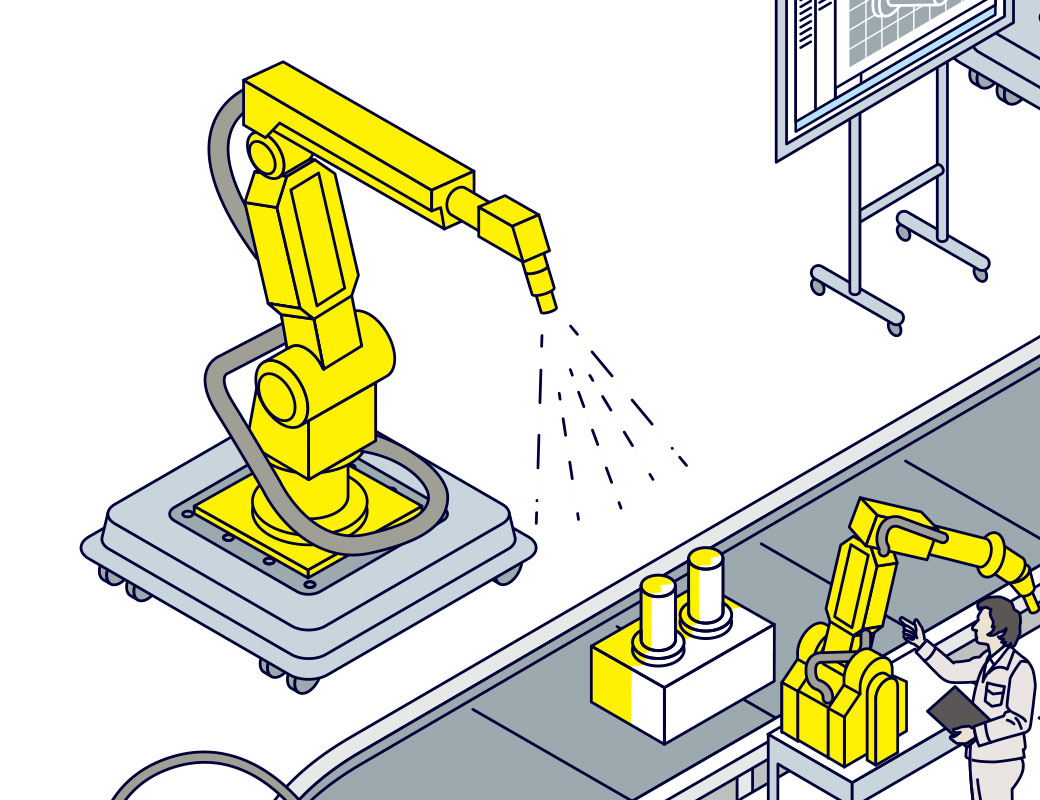
ロボット自らが移動し、生産量をコントロールする工場が生まれる。 LINKWIZの技術によって、ものづくりの現場はどう変わっていくでしょうか。これからの工場の姿を描いてみました。これは決して空想ではなく、現実に変わっていくリアルな姿です。
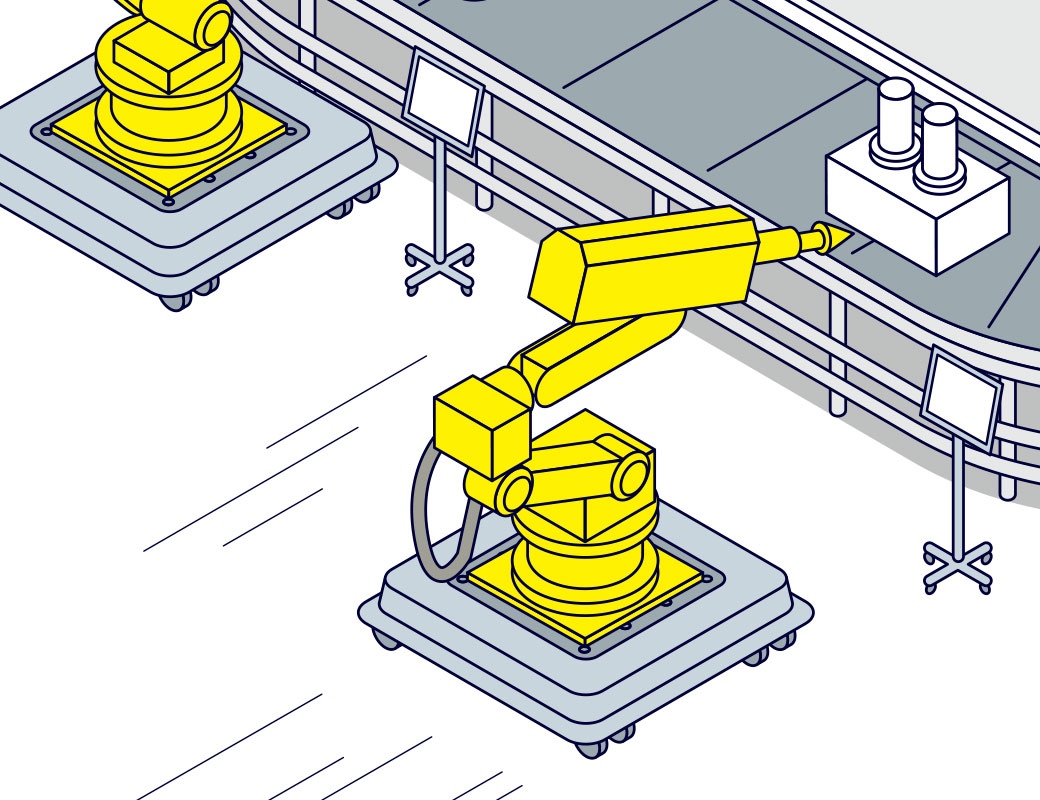
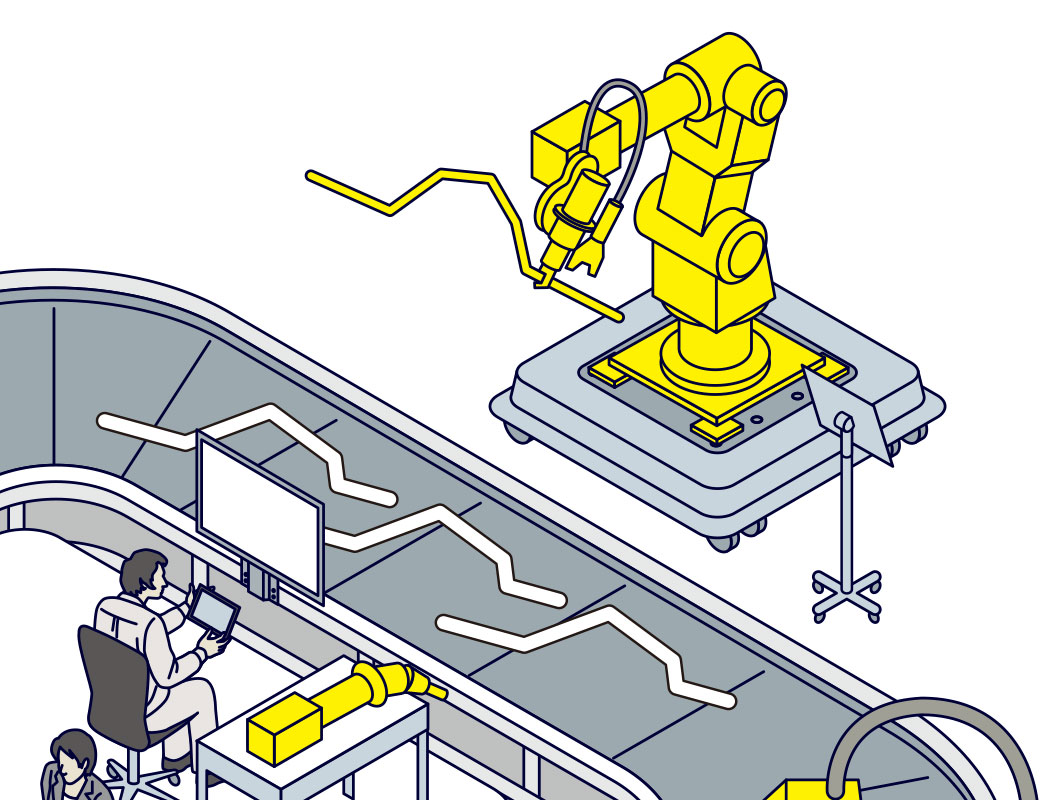
ベルトコンベアからの解放 FUTURE IMAGE 01 現在の工場はベルトコンベアを基準にして設計し、周りにロボットを配置しています。その理由は、ロボットが教えられた動きしかできないため、そのとおりにモノがくるようにベルトコンベアを使っているのです。しかし、ベルトコンベアは、全ての場所が一本の時間軸で動いているため、場所ごとに生産量をコントロールできません。 ロボットのフレキシブルな配置 FUTURE IMAGE 02 では、LINKWIZの技術で、ロボットが今やるべきことを考えるようになると、どう変わるでしょう。まず、一本のベルトコンベアでつながり、周りにロボットを配置するという制約がなくなります。忙しい時、余裕があるときなど状況に対応してロボット自らが移動し、フレキシブルな配置で生産できるようになります。 少量多品種の時代に適した工場 FUTURE IMAGE 03 例えば、同じ仕事をするロボットが5台あるとします。1本のベルトコンベアだと5台を横に並べることになります。ロボットが自由に動けば、円形に配置して1/3程度のスペースにすることが可能です。自由にレイアウトできる、自由に生産量を決められる。これからの少量多品種を生産する時代に適した工場をつくることができます。 人の活躍の場が拡がる FUTURE IMAGE 04 そこで働く人は、ロボットが苦手とすることをサポートするようになります。人がものづくりをはじめると、その人はその一つのことしかできなくなります。ロボットがやれば、その人は複数箇所のものづくりを担当できるようになったり、これまで以上に知恵を働かせる余裕が生まれるため、生産性が向上します。 新しい工場のモデルルーム FUTURE IMAGE 05 これからの工場には、新しいつくり方が必要です。変えることはたいへんなことですが、それ以上に可能性に満ちたおもしろいことでもあります。LINKWIZは、そのモデルルームになりたいと考えています。