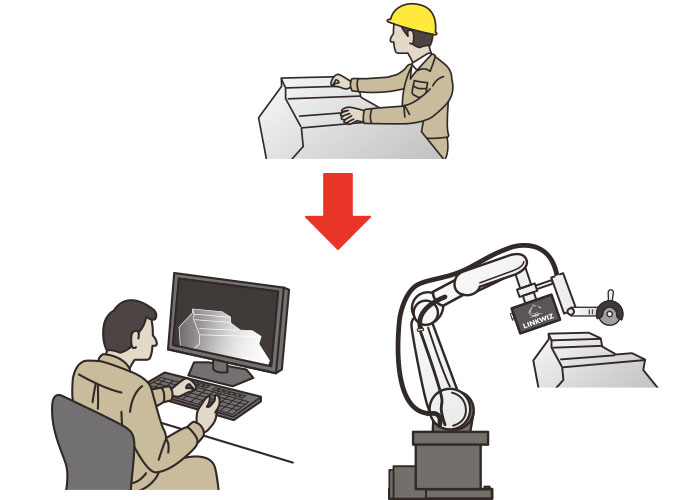
3Dスキャン形状から研磨位置をロボットへ指示
大型鋳造品の研磨作業は単品モノのため、ヒトの手作業が多く自動化が困難でした。
L-ROBOTは、3Dスキャンした三次元形状をもとに、研磨する位置をマウスクリックすることで、ロボットが研磨する位置の指示(ロボットのティーチング座標を生成する機能)が可能になりました。また、自動化設備を構築する事で、悪環境によるヒトの負荷を大幅に削減しています。
導入前
- 高温・鉄粉が舞う悪環境の現場で、全てヒトが研磨作業をしていた。
- ロボットを導入したがティーチング作業ができず、ほとんど稼働していなかった。
導入後イメージ
- ロボットで加工出来る様になったので、悪環境からヒトの負荷が軽減した。
- ヒトが三次元形状を見て研磨指示ができる為、単品モノでもロボットによる研磨作業が可能となった。
- ロボットのティーチング作業が削減できた為、作用員確保の問題が解決した。